一��、工業(yè)機器人按臂部的運動形式分為四種:
1��、直角坐標(biāo)型的臂部可沿三個直角坐標(biāo)移動;
2���、圓柱坐標(biāo)型的臂部可作升降、回轉(zhuǎn)和伸縮動作���;
3�、球坐標(biāo)型的臂部能回轉(zhuǎn)、俯仰和伸縮;
4��、關(guān)節(jié)型的臂部有多個轉(zhuǎn)動關(guān)節(jié)���。

犀靈工業(yè)機器人培訓(xùn)中心
二�����、工業(yè)機器人按執(zhí)行機構(gòu)運動的控制機能又可分點位型和連續(xù)軌跡型��。
1、點位型只控制執(zhí)行機構(gòu)由一點到另一點的準(zhǔn)確定位����,適用于機床上下料����、點焊和一般搬運��、裝卸等作業(yè)��;
2�、連續(xù)軌跡型可控制執(zhí)行機構(gòu)按給定軌跡運動,適用于連續(xù)焊接和涂裝等作業(yè)����。

犀靈工業(yè)機器人培訓(xùn)中心
三�、工業(yè)機器人按程序輸入方式區(qū)分有編程輸入型和示教輸入型兩類:
1����、編程輸入型是將計算機上已編好的作業(yè)程序文件���,通過RS232串口或者以太網(wǎng)等通信方式傳送到機器人控制柜�。
2�、示教輸入型的示教方法有兩種:
一種是由操作者用手動控制器(示教操縱盒)����,將指令信號傳給驅(qū)動系統(tǒng),使執(zhí)行機構(gòu)按要求的動作順序和運動軌跡操演一遍;
另一種是由操作者直接領(lǐng)動執(zhí)行機構(gòu)�,按要求的動作順序和運動軌跡操演一遍。在示教過程的同時,工作程序的信息即自動存入程序存儲器中在機器人自動工作時�,控制系統(tǒng)從程序存儲器中檢出相應(yīng)信息,將指令信號傳給驅(qū)動機構(gòu)�����,使執(zhí)行機構(gòu)再現(xiàn)示教的各種動作。示教輸入程序的工業(yè)機器人稱為示教再現(xiàn)型工業(yè)機器人�����。

犀靈工業(yè)機器人培訓(xùn)中心
四�、智能工業(yè)機器人
具有觸覺�����、力覺或簡單的視覺的工業(yè)機器人�����,能在較為復(fù)雜的環(huán)境下工作;如具有識別功能或更進一步增加自適應(yīng)、自學(xué)習(xí)功能�,即成為智能型工業(yè)機器人��。它能按照人給的“宏指令”自選或自編程序去適應(yīng)環(huán)境��,并自動完成更為復(fù)雜的工作���。
【其他知識】
一.工業(yè)機器人作業(yè)特點
工業(yè)機器人是一種通過重復(fù)編程和自動控制�,能夠完成制造過程中某些操作任務(wù)的多功能����、多自由度的機電一體化自動機械裝備和系統(tǒng),它結(jié)合制造主機或生產(chǎn)線���,可以組成單機或多機自動化系統(tǒng)�,在無人參與下,實現(xiàn)搬運、焊接���、裝配和噴涂等多種生產(chǎn)作業(yè)����。如圖1所示的是生產(chǎn)線上操作的工業(yè)機器人���。
當(dāng)前�����,工業(yè)機器人技術(shù)和產(chǎn)業(yè)迅速發(fā)展����,在生產(chǎn)中應(yīng)用日益廣泛���,已成為現(xiàn)代制造生產(chǎn)中重要的高度自動化裝備�����。

犀靈工業(yè)機器人培訓(xùn)中心
二.工業(yè)機器人的特點
自20世紀(jì)60年代初第一代機器人在美國問世以來�����,工業(yè)機器人的研制和應(yīng)用有了飛速的發(fā)展��,但工業(yè)機器人最顯著的特點歸納有以下幾個��。
1.可編程��。生產(chǎn)自動化的進一步發(fā)展是柔性自動化�����。工業(yè)機器人可隨其工作環(huán)境變化的需要而再編程�����,因此它在小批量多品種具有均衡高效率的柔性制造過程中能發(fā)揮很好的功用��,是柔性制造系統(tǒng)(FMS)中的一個重要組成部分��。
2.擬人化��。工業(yè)機器人在機械結(jié)構(gòu)上有類似人的行走����、腰轉(zhuǎn)��、大臂��、小臂���、手腕�����、手爪等部分���,在控制上有電腦���。此外,智能化工業(yè)機器人還有許多類似人類的“生物傳感器”�����,如皮膚型接觸傳感器�、力傳感器、負載傳感器����、視覺傳感器、聲覺傳感器�、語言功能等。傳感器提高了工業(yè)機器人對周圍環(huán)境的自適應(yīng)能力��。
3.通用性�。除了專門設(shè)計的專用的工業(yè)機器人外���,一般工業(yè)機器人在執(zhí)行不同的作業(yè)任務(wù)時具有較好的通用性。比如���,更換工業(yè)機器人手部末端操作器(手爪�、工具等)便可執(zhí)行不同的作業(yè)任務(wù)���。
4.機電一體化��。工業(yè)機器人技術(shù)涉及的學(xué)科相當(dāng)廣泛��,但是歸納起來是機械學(xué)和微電子學(xué)的結(jié)合——機電一體化技術(shù)�。第三代智能機器人不僅具有獲取外部環(huán)境信息的各種傳感器�,而且還具有記憶能力��、語言理解能力�、圖像識別能力、推理判斷能力等人工智能����,這些都和微電子技術(shù)的應(yīng)用,特別是計算機技術(shù)的應(yīng)用密切相關(guān)�����。因此,機器人技術(shù)的發(fā)展必將帶動其他技術(shù)的發(fā)展�,機器人技術(shù)的發(fā)展和應(yīng)用水平也可以驗證一個國家科學(xué)技術(shù)和工業(yè)技術(shù)的發(fā)展和水平。
三.工業(yè)機器人的組成
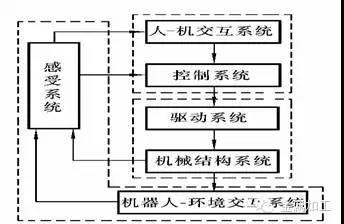
工業(yè)機器人系統(tǒng)由三大部分六個子系統(tǒng)組成��。三大部分是:機械部分����、傳感部分、控制部分����。六個子系統(tǒng)是:驅(qū)動系統(tǒng)、機械結(jié)構(gòu)系統(tǒng)�、感受系統(tǒng)、機器人—環(huán)境交互系統(tǒng)��、人—機交互系統(tǒng)���、控制系統(tǒng)�����。下面將分述六個子系統(tǒng)��。
1.驅(qū)動系統(tǒng)
要使機器人運行起來�,就需給各個關(guān)節(jié)即每個運動自由度安置傳動裝置,這就是驅(qū)動系統(tǒng)����。驅(qū)動系統(tǒng)可以是液壓傳動、氣動傳動��、電動傳動����,或者把它們結(jié)合起來應(yīng)用的綜合系統(tǒng);可以直接驅(qū)動或者通過同步帶���、鏈條���、輪系、諧波齒輪等機械傳動機構(gòu)進行間接驅(qū)動���。
2.機械結(jié)構(gòu)系統(tǒng)
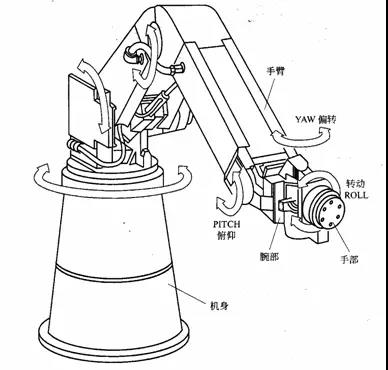
工業(yè)機器人的機械結(jié)構(gòu)系統(tǒng)是工業(yè)機器人為完成各種運動的機械部件。系統(tǒng)由骨骼(桿件)和連接它們的關(guān)節(jié)(運動副)構(gòu)成���,具有多個自由度���,主要包括手部�����、腕部���、臂部、機身等部件���。
?�。?)手部�。又稱為末端執(zhí)行器或夾持器���,是工業(yè)機器人對目標(biāo)直接進行操作的部分���,在手部可安裝專用的工具,如焊槍���、噴槍�、電鉆、電動螺釘(母)擰緊器等�����。
?。?)腕部。腕部是連接手部和臂部的部分�,主要功能是調(diào)整手部的姿態(tài)和方位。
?。?)臂部。用以連接機身和腕部���,是支撐腕部和手部的部件����,由動力關(guān)節(jié)和連桿組成���。用以承受工件或工具的負荷��,改變工件或工具的空間位置�����,并將它們送至預(yù)定位置��。
?��。?)機身。是是機器人的支撐部分�,有固定式和移動式兩種。
文章來源:互聯(lián)網(wǎng)����,犀靈機器人http://整理發(fā)布