接觸式圖像傳感器(CIS)線掃描相機可提高視覺系統(tǒng)分辨率����,以識別汽車玻璃上絲網(wǎng)印刷跡線中的孔、空隙和斷裂等缺陷�����。
線掃描相機可提高視覺系統(tǒng)分辨率�,可以識別0.25 mm的孔、空隙和斷裂等天窗玻璃絲網(wǎng)印刷中的缺陷���。將銀色墨水絲網(wǎng)印刷到汽車天窗玻璃上時����,堵塞或拉伸的屏幕會導(dǎo)致部分斷裂����、完全斷裂或跡線變薄。有時墨水不足或墨水中有氣泡�,都可能導(dǎo)致缺陷。
如果汽車天窗玻璃跡線上的缺陷在生產(chǎn)過程中沒有被發(fā)現(xiàn)�,則會導(dǎo)致天窗無法運行����,以及損失時間和生產(chǎn)成本���。此外�,由于絲網(wǎng)印刷過程的性質(zhì)���,當(dāng)系統(tǒng)開始檢測有缺陷部件時,制造商知道通常整個批次可能是有缺陷的����。
在產(chǎn)品出廠之前發(fā)現(xiàn)這些缺陷是非常必要的,而對玻璃的精確檢查則是一項艱巨的挑戰(zhàn)���。機器視覺系統(tǒng)集成商Performance Automation開發(fā)了一個系統(tǒng)基于接觸圖像傳感器(CIS)線掃描相機集成照明和定制軟件來識別潛在的缺陷��。

圖1.玻璃從兩個獨立的托盤中取出�,并通過兩個Fanuc機器人放置在傳送帶上�,當(dāng)玻璃在傳感器視野中移動時,SICK增量編碼器跟蹤運動�。歐姆龍光電傳感器檢測到玻璃的存在并觸發(fā)三菱線掃描相機的圖像采集功能。
Performance Automation Vision工程經(jīng)理Lowell Cady解釋說����,在以前的系統(tǒng)中����,制造商無法檢測到0.25毫米或更小的斷裂��,因此可能一整天的生產(chǎn)都無法正常工作��。
在系統(tǒng)(圖1)中����,CIS線掃描攝像機將高分辨率圖像提供給執(zhí)行缺陷檢測的專有軟件。三菱單色KD6R926MX相機以600 dpi拍攝圖像�。該攝像機基于21,888像素線掃描圖像傳感器,掃描速度高達43 kHz����,具有929.6 mm掃描寬度,Camera Link接口����,白色LED陣列,以及提供12 mm對齊CIS傳感器芯片的設(shè)計���。
為了設(shè)置檢測過程��,操作人員需要在輸送機上設(shè)置合適的部件�����,并使用基于網(wǎng)格的菜單系統(tǒng)的人機界面(HMI)選擇“獲取黃金圖像”命令����。這張圖稍后定義了檢查過程。(圖2)��。

圖2.要設(shè)置檢查過程����,操作員在傳送帶上設(shè)置正確構(gòu)建的部件�,并使用帶有基于網(wǎng)格的菜單系統(tǒng)的人機界面(HMI)選擇“獲取黃金圖像”命令。該圖像稍后定義了檢查過程����。
不同厚度的玻璃在檢測線上運行,相機必須距離被檢查表面12毫米���。為了實現(xiàn)這一目標(biāo)���,該團隊安裝了東方馬達的兩個緊湊型線性執(zhí)行器���。這些線性執(zhí)行器將相機移動1英寸(25毫米),使其保持對焦�。操作員選擇要運行的玻璃模型,該過程的第一步涉及使用電機改變攝像機的高度并將其設(shè)置為正確的焦距���。
玻璃從兩個獨立的托盤中取出�,并由兩個Fanuc機器人和一個SICKDFS60可編程增量編碼器放在傳送帶上用于跟蹤玻璃在傳感器視場中移動時的運動�����。反饋用于動態(tài)調(diào)整逐行圖像構(gòu)建���。根據(jù)Cady的說法���,這很重要,因為應(yīng)用程序需要使用方形像素來最小化圖像內(nèi)的壓縮或拉伸偽影�。
來自歐姆龍的照片檢測玻璃的存在并觸發(fā)圖像采集。玻璃完全在相機下方傳送(圖3)��,所獲得的圖像通過National Instruments的Camera Link圖像采集卡傳輸?shù)交赪indows 10的Dell電腦�。接下來,利用NI的軟件和NI的視覺采集驅(qū)動程序分析圖像數(shù)據(jù)���。
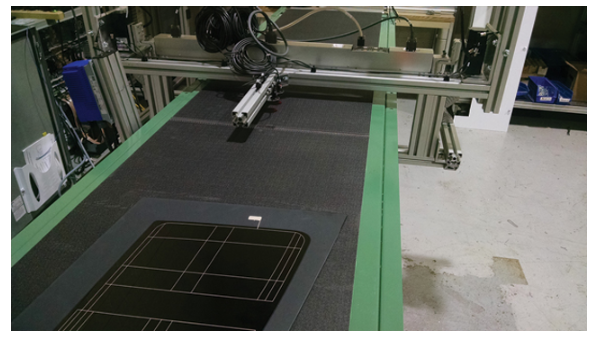
圖3.汽車天窗玻璃上的跡線在三菱電機的線掃描攝像機視野下通過時進行檢查���。
Cady說:由于系統(tǒng)捕獲的單個圖像最終大小約為250萬像素��,因此CPU會按比例縮小圖像�����,以便加快模式搜索和操作”����。
一旦在縮放后的圖像中檢測到玻璃���,坐標(biāo)就會被縮放�����,以顯示用于跟蹤的工具在較大圖像中的位置。對于質(zhì)心和霍夫線檢測��,圖像按原尺寸的1/10縮放�,對于模式匹配,按原尺寸的1/4縮放�����。最小缺陷大小取決于缺陷的類型
如果線路中斷,我們可以檢測到3像素寬���。如果是氣泡��,可以檢測到3 x 3像素的區(qū)域��,如果它是線條越來越窄的芯片�����,系統(tǒng)可以檢測到12像素寬���。如果它變得越來越窄,超過4個像素�,那么我們就會發(fā)現(xiàn)它。
自動識別軌跡的交點����,并且模式匹配算法檢查并屏蔽所識別的交叉點。一些交叉點是90°��,其他交叉點是Y形��,因此每種類型的交叉點都需要自己的模式匹配。
“之前的版本使用鐵路領(lǐng)帶從外部找到邊緣��,但新方法通過模式匹配使路徑居中��,然后徑向搜索最靠近模式中心的左右邊緣���,”卡迪說���。
屏蔽交叉點會產(chǎn)生一系列線段,并使用相同的算法檢查所有線段����。
“使用角點將路徑模型與玻璃對齊以創(chuàng)建單應(yīng)矩陣而不是模式匹配方法的測試并不像我想象的那樣最初是健壯的,因此我們使用模式匹配算法�,”Cady說。 “但是����,我們還沒有準(zhǔn)備好放棄使用特征來創(chuàng)建單應(yīng)矩陣,因為我們希望這些路徑都可以從一個單應(yīng)矩陣轉(zhuǎn)變�����?����!?br />
然而����,即使在對它們進行預(yù)過濾之后,這些特征也不能產(chǎn)生可靠的結(jié)果����。為了改善這一點,通過線的凸包發(fā)現(xiàn)玻璃的質(zhì)心���,允許模型移動到玻璃位置��。
通過用霍夫變換檢測主線來找到模型的旋轉(zhuǎn)����。一旦知道位置和旋轉(zhuǎn)����,就可以通過模式匹配來提高特征檢查的準(zhǔn)確性。每個交叉點特征都有自己的模板����,該模板是從模型中提取的����,模板可以在編輯器中進行屏蔽��,裁剪和重新居中���。模式匹配在PC上以八個并行循環(huán)運行���,所有八個的結(jié)果在5-10毫秒內(nèi)找到。得到的分數(shù)非常好 – 超過900��,并且路徑使用模式匹配的結(jié)果來更準(zhǔn)確地與玻璃對齊��。
根據(jù)卡迪的說法����,每塊玻璃的采集時間約為2秒,檢查時間約為3秒���,每片玻璃的完整周期時間約為5秒�。
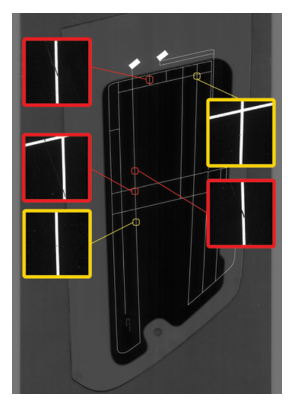
圖4.如果軟件檢測到缺陷或異常�����,操作員通過HMI顯示屏獲得“光”圖形指示器����,并且覆蓋標(biāo)記缺陷的位置,允許操作員放大以進行進一步檢查�����。紅色表示失敗���,黃色表示警告��。
如果軟件檢測到缺陷�����,操作員會在HMI顯示屏上獲得一個“淺色”圖形指示器����,并且覆蓋標(biāo)記缺陷的位置����,允許操作員放大進一步檢查(圖4)�。如果操作員在發(fā)現(xiàn)缺陷時遠離系統(tǒng)���,則配備有填充真空夾具的第三個Fanuc機器人 – 以避免劃傷玻璃 – 移除玻璃并將其放入蓄能器中��。通過檢查的玻璃被移入爐中���。這是可能的,因為系統(tǒng)的I / O卡向三菱電機可編程邏輯控制器發(fā)送通過/未通過信號��,該控制器控制輸送機并向機器人發(fā)出信號以啟動每個操作�����。
該系統(tǒng)固有的另一個問題是玻璃經(jīng)常粘在無紋理的表面上��,使得機器人很難將其從傳送帶上取下����。為了解決這個問題,輸送機表面具有1至2毫米高的手指狀紋理����。
“我們無意中碰到了一個最佳點,因為相機的景深[約1毫米]很淺��,所以輸送機紋理上的任何細節(jié)都沒有足夠的對比度來影響整體檢測,”卡迪說�。
另外,制造商使用滑動刻度來對有限量的不同特征進行評分���,而不是僅僅做出是或否確定�。
“例如�����,如果氣泡低于閾值���,這對于質(zhì)量目的而言很重要,操作員可以設(shè)置系統(tǒng)�����,這樣您就需要在2 mm區(qū)域內(nèi)有大量氣泡才能使其失效��。無法改變的一個特征是����,如果在整個生產(chǎn)線上一直存在裂縫,它每次都會失敗����?���!?br />
Performance Automation的副總裁兼首席執(zhí)行官Gene Kalhorn說����,這種新的檢測系統(tǒng)正在發(fā)現(xiàn)以前看不見的缺陷,并提供數(shù)據(jù)以告知未來的天線跟蹤打印過程以避免故障���。
“機器視覺系統(tǒng)檢測到的缺陷使汽車玻璃制造商能夠看到故障類型的趨勢����,并在成為主要問題之前對絲網(wǎng)印刷過程進行適當(dāng)?shù)母淖?���,”Kalhorn說。 “他們還可以使用機器視覺系統(tǒng)作為一種工具�,看看工程修復(fù)是否確實能夠做出足夠的改變?!?/span>
文章來源:互聯(lián)網(wǎng),犀靈機器人http://整理發(fā)布